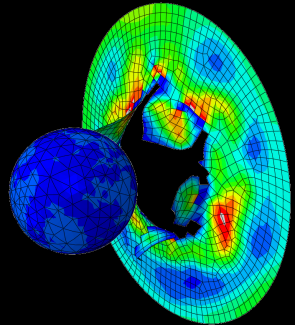

| En el escrito anterior “SIMULIA ABAQUS – PARTE 1” hablamos sobre la simulación realista y cuáles eran sus características, nada más y nada menos que hacer algo tan complejo como una simulación que es físicamente real a través de herramientas numéricas.Hablamos sobre las no linealidades que están presentes todo el tiempo y para tratar de estudiarlas las hemos divido en 3 categorías: No linealidades geométricas, no linealidades de material y no linealidades de condiciones de borde.Abaqus que es el responsable de hacer estas simulaciones es un código de elemento finito de propósito general, eso significa que puede hacer análisis de esfuerzos y deformaciones en cualquier producto, hasta análisis sofisticados de crash (cosas de autos) o análisis de fractura hidráulica (cosas de pozos petroleros). Pero ¿Por qué es difícil resolver problemas no lineales? Pueden existir varias causas por lo cual se torna turbio y son las siguientes:
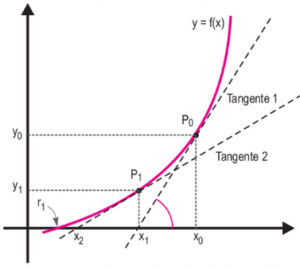
Todo esto no existe en problemas lineales por lo que es mucho más sencillo resolverlos. La pregunta es: Si tengo toda esta complejidad, ¿cómo es que “abaqus” lo resuelve? Es mucho más complejo que esto, pero la respuesta es “NEWTON RAPHSON”.
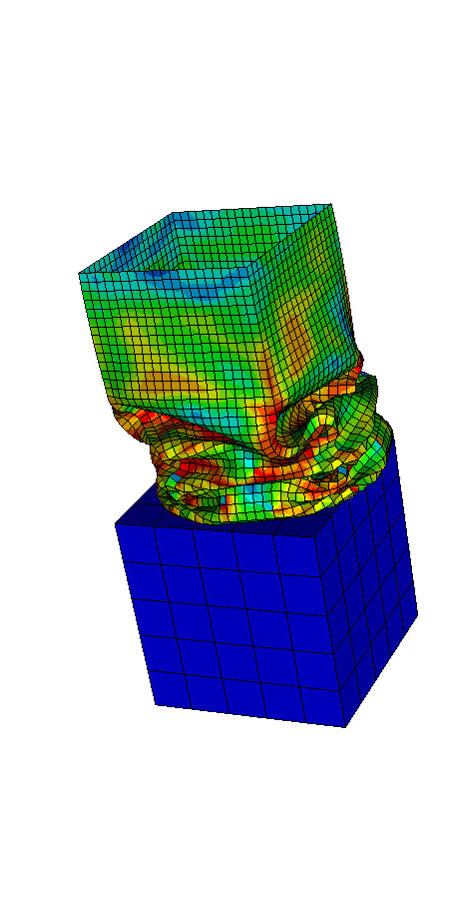
Lo que hace este método es que la carga se divide en pequeños “incrementos de carga” y resolvemos para dichos incrementos. Dada una pequeña porción de “P” (este es el primer incremento) y aplicamos newton Raphson para encontrar una posición de equilibro alrededor de este incremento “P”, esto se repite varias veces hasta que la carga se aplica completamente. Pero desde el punto de vista lineal esto no tiene mucho sentido, ¿Por qué tengo que dividir la carga en una pequeña porción y resolver y volver a aplicar una pequeña carga y resolver hasta aplicar la carga completa? ¿Por qué no aplicar la carga total y listo?, bueno la respuesta a esto es por la dependencia en la historia o evolución del problema. Estas herramientas nos permiten predecir el comportamiento de un sinnúmero de fenómenos que de otra manera sería imposible. La intención de esta tecnología es reducir los tiempos de ciclo de diseño, mejorar el producto desde sus etapas iniciales y garantizar la calidad de tu producto. |






{kind=link}